一、产品概述
本设备以工业机器人与机器视觉为核心,将机械、气动、运动控制、PLC控制技术有机地进行整合,结构模块化,便于组合,实现对不同物料进行快速的检测、组装。为了方便实训教学,系统进行了专门的设计,可以完成各类机器人单项训练和综合性项目训练,可完成各类机器人单项训练和综合性项目训练。可以进行六轴机器人示教、定位、抓取、装配等训练,
包含六自由度工业机器人、智能视觉检测系统、PLC控制系统及一套供料、输送、装配、仓储机构,可以实现对高速传输的工件进行分拣、检测、搬运、装配、存储等操作。
该平台各组件均安装在型材桌面上,机械结构、电气控制回路、执行机构相对独立,采用工业标准件设计。通过此平台可以进行机械组装、电气线路设计与接线、PLC编程与调试、智能视觉流程编辑、工业机器人编程与调试应用等多方面训练,适合职业院校、技工学校自动化类相关专业《工业机器人与控制技术》、《自动化技术》等课程的实训教学,适合自动化技术人员进行工程训练及技能比赛。
二、技术性能
1. 输入电源:单相三线~220V±10% 50Hz
2. 工作环境:温度-10℃~+40℃ 相对湿度≤85%(25℃) 海拔<4000m
3. 装置容量:<1.5kVA
4. 实训平台尺寸:1400mm×1200mm×1500mm
5. 安全保护:具有漏电保护,安全符合国家标准
三、设备组成
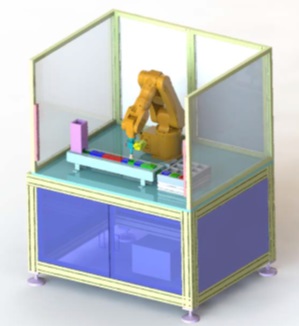
1、系统总体介绍及组成
主要由 1 台SD500E 机器人、1 个机器人吸盘夹具、1台PLC S7-1200 CPU1214、1 个机器人工作台、1 个方型放置盒、1个视觉传感器、1 个物料传送带、电控装置等组成,此工位实现搬运,码垛,及智能填补空缺。
2、末端组成部分
机器人抓具采用真空吸盘、颜色识别传感器、视觉系统及法兰支架组成,运行平稳,结构可靠。
3、自动输送线
自动输送线采用皮带传动,减速电机驱动,运行平稳。
4、欧姆龙智能视觉检测系统
配备一套欧姆龙智能视觉系统,由视觉控制器、白色光源、视觉相机及监视显示器等组成。用于检测工件的特性,如数字、颜色、形状等,还可以对装配效果进行实时检测操作。通过I/O电缆连接到PLC或机器人控制器,也支持串行总线和以太网总线连接到PLC或机器人控制器,对检测结果和检测数据进行传输。
5、西门子可编程控制器单元
配备西门子S7-1200 CPU1214可编程控制器,自带以太网通讯模块、数字量扩展模块控制机器人、电机、气缸等执行机构动作,处理各单元检测信号,管理工作流程、数据传输等任务。
6、 工件存储盒供料单元
包含一套步进电机推杆、DM556步进驱动、料盒存储槽等组成,安装在型材实训桌上,当一个工件存储盒被取走会自动退出下一个工件存储盒,用于工件存储盒自动供料。
7、工件组装单元
由工件存储盒托盘及型材立柱组成,安装在型材实训桌上,用于装配工件。工件盒内设有4个工件槽用于放置工件,机器人可以根据不同配方按照上位机设定颜色进行放置工件。
8、仓库单元
由工件存储盒托盘及型材立柱组成,安装在型材实训桌上,机器人用于放置装配完的组件进行堆垛,也可以通过机器人对装配完成的组件进行拆垛。
9、废品回收桶
安装在型材实训桌左后侧,用于机器人自动放置被检测出来的无用工件或不合格品。
10、 以太网路由器
以太网路由器将PLC、机器人控制器、智能视觉控制器组成一个以太网局域网,进行数据的相互传输,实现工业现场控制系统的高层次应用,同时可以培养和考核学生对工业网络的使用技能。
11、在线远程教育学习软件
在线教育系统首页须有本企业LOGO,提供免费远程PLC培训,伺服,步进,触摸屏,变频器, 单片机,数控,机器人,工业组态及网络通信等全系列自动化技术培训,自由组合不同教学手段,实现各种不同的教学方法,比如谈话式、研讨式、活动式、竞赛式等等,12种教学手段,游戏化闯关式学习体验,三大管理系统,网校CRM系统
12、工业4.0仿真实训软件
软件采用三维建模基于虚拟现实技术的计算机仿真模拟技术,可以进行PLC电气控制仿真、电工电子仿真、气动仿真、液压仿真、传感器仿真等工业常用技术仿真
1)PLC仿真可以通过PLC编程控制模型的相应动作从而完成工序动作包含机械手仿真、自动门仿真、升降机仿真、分拣仿真、正反转仿真、邮件分拣、流水线、自动分拣等。
2)电工电子仿真
(1)接线仿真
01具有过载保护的正转控制接线仿真、02双重互锁的正反转控制接线仿真、05接触器星形、三角形控制接线仿真、06时间继电器接线仿真、07三相电动机机械制动控制电路仿真
(2)电路仿真
01具有过载保护的正转控制仿真、02双重互锁的正反转控制仿真、03生产机械行程控制电路仿真、04自耦降压起动仿真、05接触器星形、三角形控制仿真、06时间继电器仿真、07三相电动机机械制动控制电路仿真、08电动机反接制动控制电路仿真、09有变压器全波整流能耗制动控制电路仿真、10接触器控制的双速电动机调速电路仿真、12利用电流继电器控制绕线式异步电动机起动控制线路仿真、c620车床电气控制仿真,电动葫芦仿真,z35摇臂钻床仿真
(3)排故仿真
01具有过载保护的正转控制排故、02双重互锁的正反转控制排故、03生产机械行程控制电路排故、04自耦降压起动排故、05接触器星形、三角形控制排故、06时间继电器排故、07三相电动机机械制动控制电路排故、08电动机反接制动控制电路排故、09有变压器全波整流能耗制动控制电路排故、10接触器控制的双速电动机调速电路排故、12利用电流继电器控制绕线式异步电动机起动控制线路排故、13c620车床电气控制排故、两地控制连线等
(4)原理仿真
变压器工作原理、步进电动机工作原理、单向异步电动机工作原理、电度表工作原理、两地控制灯电路、钳型电流表原理、热继电器工作原理、伺服电动机工作原理、兆欧表工作原理、塑壳式断路器工作原理、交流接触器原理等
(5)电机拆装仿真,三相异步机拆分、单相异步机拆分等
(6)仪器仪表的使用仿真万用表、双踪示波器、信号发生器、频谱仪、钳形表等
3)气动回路仿真
(1)软件以气动经典22回路为依据开发出28回路的在线及离线仿真
(2)软件中设置的14路“考考你!”表现为典型气路设备故障。
(3)软件状态含“模拟运行”“联机运行”即离线仿真、在线仿真。两种运行状态自动切换,当连接外部设备时自动切换为在线仿真,无外部设备连接时为离线仿真即模拟运行。
软件中离线仿真13个回路包括:1、单作用气缸的换向回路(a)2、双作用气缸的换向回路(a)3、单作用气缸的速度控制回路(a)4、单作用气缸的速度控制回路(b)5、双作用气缸单向调速回路(a)6、双作用气缸单向调速回路(b)7、双作用气缸的速度控制回路一 8、双作用气缸的速度控制回路二 9、压力控制回路 10、计数回路 11、延时回路 12、用机械行程阀的单往复控制回路 13、过载保护回路。
离线、在线自动切换的15个回路包括:1、单作用气缸的换向回路(b)2、双作用气缸的换向回路(b)3、速度换接回路4、缓冲回路5、互锁回路6、用行程开关的单缸往复运动回路7、单缸连续往复动作回路8、直线缸、旋转缸顺序动作回路9、多缸顺序动作回路10、双缸同步动作回路11、四缸联动回路12、卸荷回路13、或门型梭阀的应用回路14、快速排气阀的应用回路15、高低压切换控制回路。
(4)设置14路“考考你!”当点开了“考考你”对话框回路自动设置故障,当回答正确或关闭“考考你”对话框,故障自动接触,回路正常仿真。14路“考考你”包括模拟故障有:1单作用气缸故障2、电磁阀故障3、双作用气缸故障4、调节阀故障5、节流阀故障6、手动换向阀异常7、节流阀堵死故障8、行程开关故障9过滤三联件故障10、气容故障11、行程阀故障12、顺序阀故障13、行程开关失灵14、负载阻力过小
4)液压回路仿真其界面可清楚的展示液压元器件的内部结构以及液压回路的工作过程。液压传动原理的动态演示并不少于18种动态演示。
a) 多级高压回路b) 减压回路c) 先导式溢流阀缷荷回路d) 顺序平衡回路e) 回油节流调速回路 f) 旁路节流调速回路 g) 液压缸差动连接回路
h) 三位四通电磁换向阀换向回路 i) 液控单向阀锁紧回路 j) 顺序阀控制顺序动作回路k) 压力继电器控制顺序动作回路 l) 行程开关控制顺序同步回路 m) 调速阀控制同步回路 n) 液压马达回油节流调速回路 o) 二位四通电磁阀换向回路 p) 手动阀换向回路 q) 速度换接回路 r) 二位二通缷荷
5)传感器仿真
(1)温度变送传感器器仿真包含温度变送传感器模拟拆装;温度变送传感器模拟接线;温度变送传感器模拟运行仿真
(2)液位传感器仿真包含液位传感器模拟拆装;液位传感器模拟接线;液位传感器模拟运行仿真
(3)流量传感器仿真包含流量传感器模拟拆装;流量传感器模拟接线;流量传感器模拟运行仿真

